Роботизированная система для ударных испытаний по Шарпи

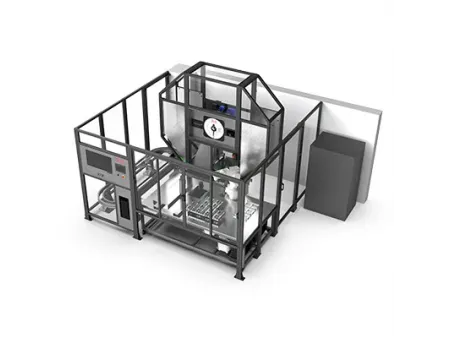



Данная роботизированная платформа для испытаний по методу Шарпи интегрирует маятниковый копер с промышленным роботом ABB, систему центрирования надреза с использованием системы машинного зрения, камеру низкотемпературной обработки, интеллектуальное электрическое управление и специализированное программное обеспечение для автоматизации всего процесса тестирования.
Это полностью автоматизированное решение способно выполнять полный цикл ударных испытаний по Шарпи – от идентификации образца до проведения удара и загрузки данных без ручного вмешательства, что значительно повышает производительность, точность и безопасность.
Оператору достаточно разместить образцы различных форм и размеров в накопительный стеллаж. До момента передачи результатов в базу данных хоста каждый шаг будет выполняться автоматически: захват роботом, измерение геометрических размеров, идентификация по штрих-коду, сортировка, низкотемпературная обработка, центрирование надреза, установка образца на опоры копра, проведение удара, удаление образца после испытания. Все типы образцов различной толщины могут быть испытаны в условиях низких температур без каких-либо ручных настроек. Наша роботизированная система для ударных испытаний по Шарпи разработана специально с интегрированными функциями автоматического обнаружения неисправностей и сигнализации для надежной долгосрочной работы.
ISO 148, EN10045, ASTM E23, GB/T 229, GB11291.1, ГОСТ 9454, ISO13850
Испытание на удар по Шарпи
- Каждый лоток вмещает 30 образцов, при этом одновременно может обрабатываться до 90 образцов.
- Высокоточный контроль температуры в пределах ±0.5°C.
- Перемещение образца роботом из спиртовой ванны к месту удара занимает менее 5 секунд, полностью удовлетворяя требованиям низкотемпературных испытаний по Шарпи.
- Центрирование с помощью машинного зрения обеспечивает точность позиционирования надреза в пределах ±0.1 мм.
- Измерение размеров и сканирование штрих-кода имеют разрешения ≤0.02 мм.
- Поддерживает высокоскоростной сбор данных для анализа удара (опционально).
- Доступ робота в камеру блокируется, если дверца камеры полностью не открыта.
- Робот не поместит пустой лоток на занятую позицию благодаря контролю положения лотка.
- Система немедленно останавливается, если открывается любая из боковых панелей доступа.
- Датчик усилия останавливает робота при обнаружении неожиданного сопротивления. После ручного перемещения в безопасное место робот возвращается к запрограммированному пути.